電装班
電装班では,ロケットの減速落下のための開放機構を適切に操作こと,
また飛行軌道・高度を解析するデータログを収集ことを目的として,
気圧・加速度センサや無線機器を搭載し,それらを管理するシステムを構築します.


設計


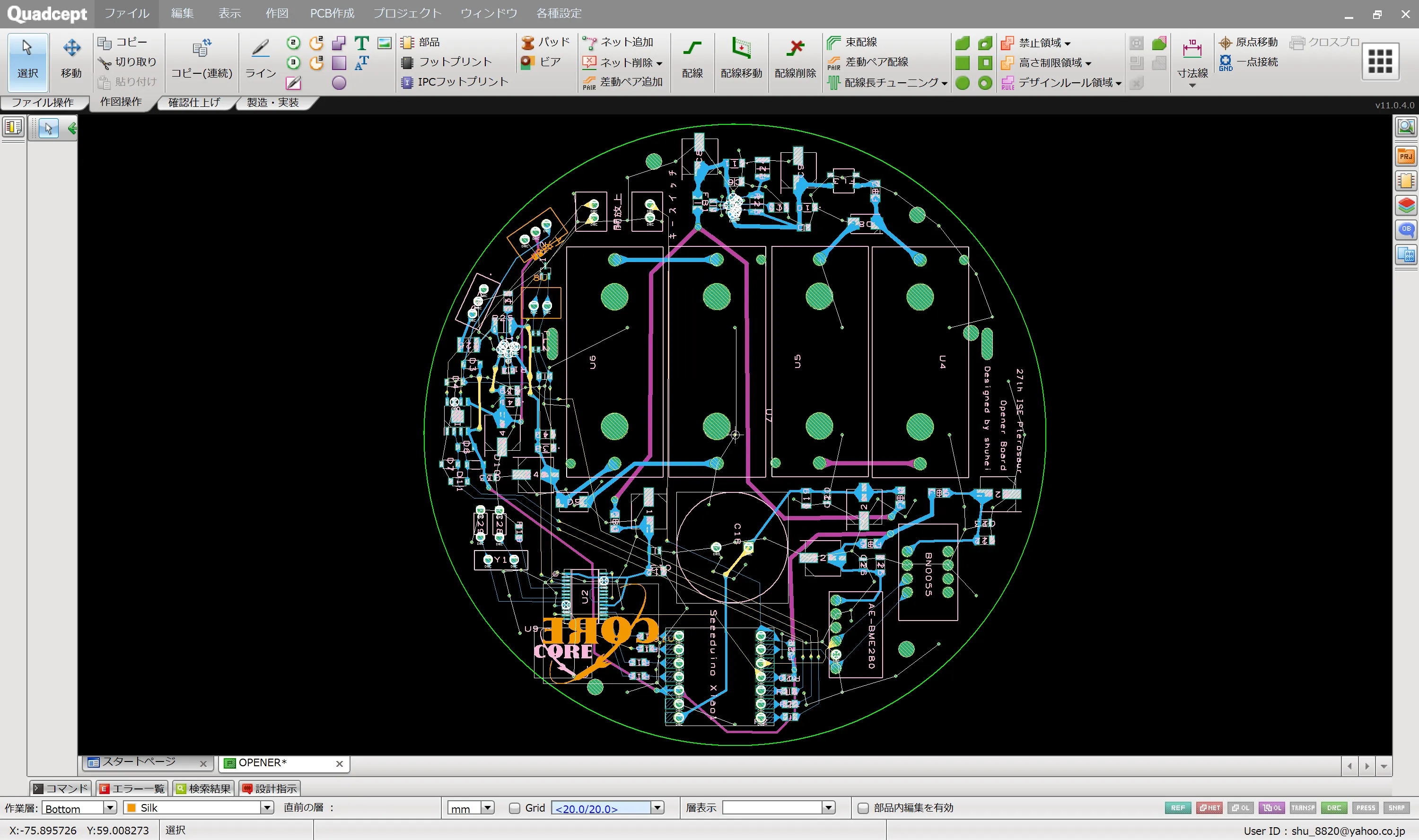
電装システムの機能を決定した後,実際に基板の設計を行います.
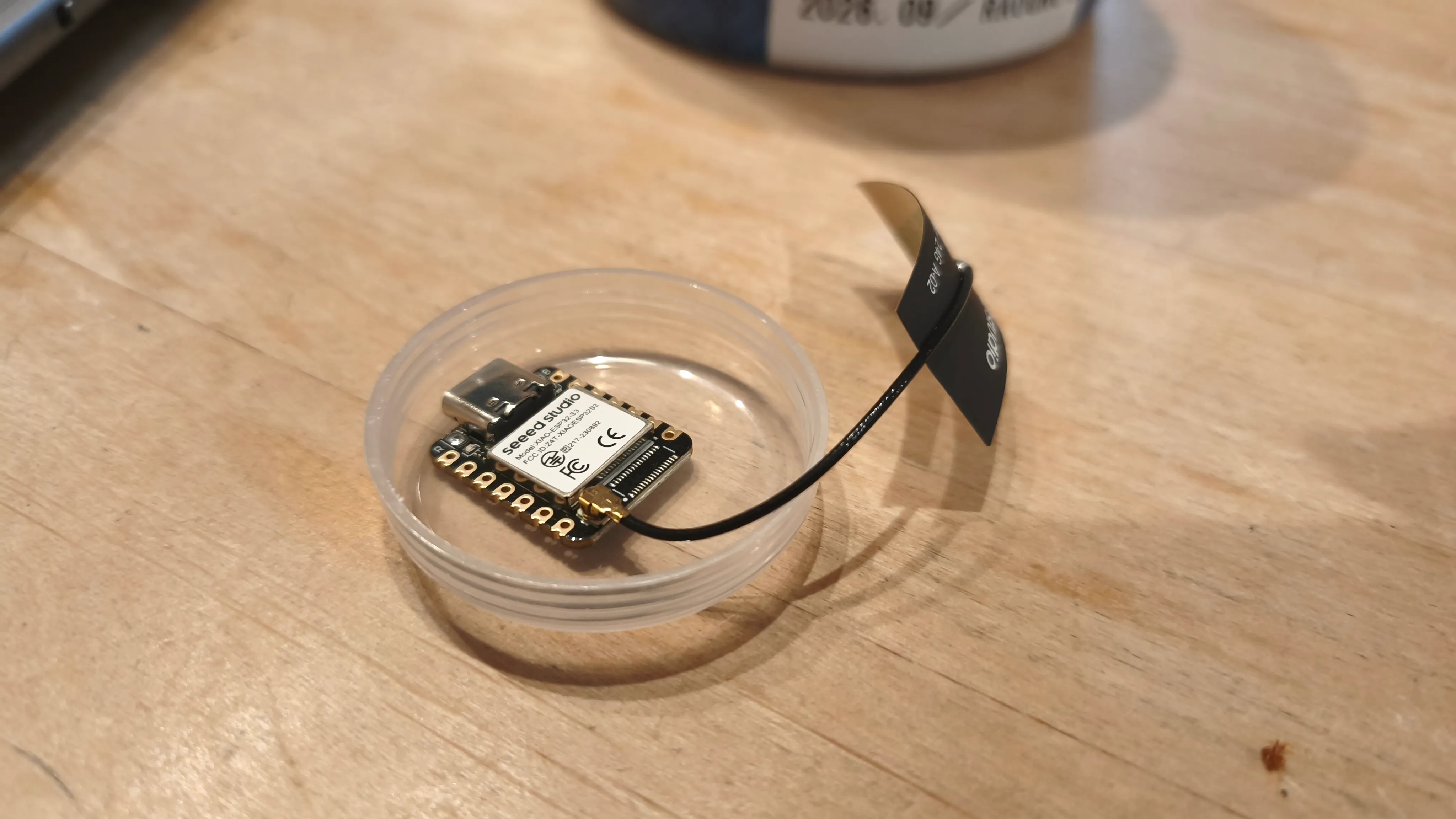
主に,GPSで位置情報を取得するGNSSモジュール,
ロケットの飛翔・頂点を検知する気圧・加速度センサモジュール,
ロケットからログを受け取り,コマンドを送信するために地上との通信を行う通信モジュール,
これらを動かす電源モジュールの4つを設計します.
互いのモジュールが連携し,洗練された電装システムの設計を目指します.
互いのモジュールが連携し,洗練された電装システムの設計を目指します.
製作
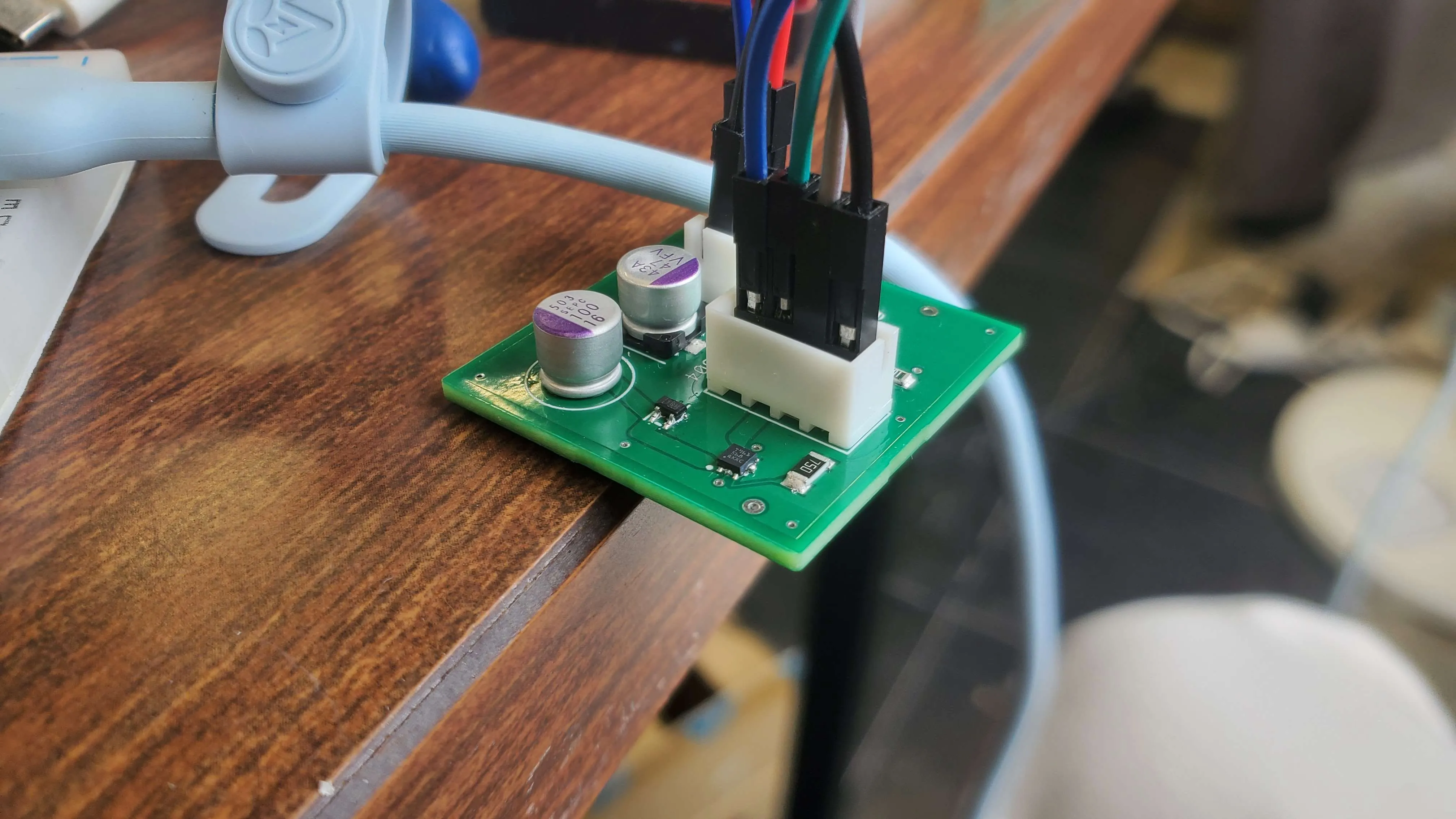
回路設計ソフトを用いて設計したPCB,使用する部品を発注します.
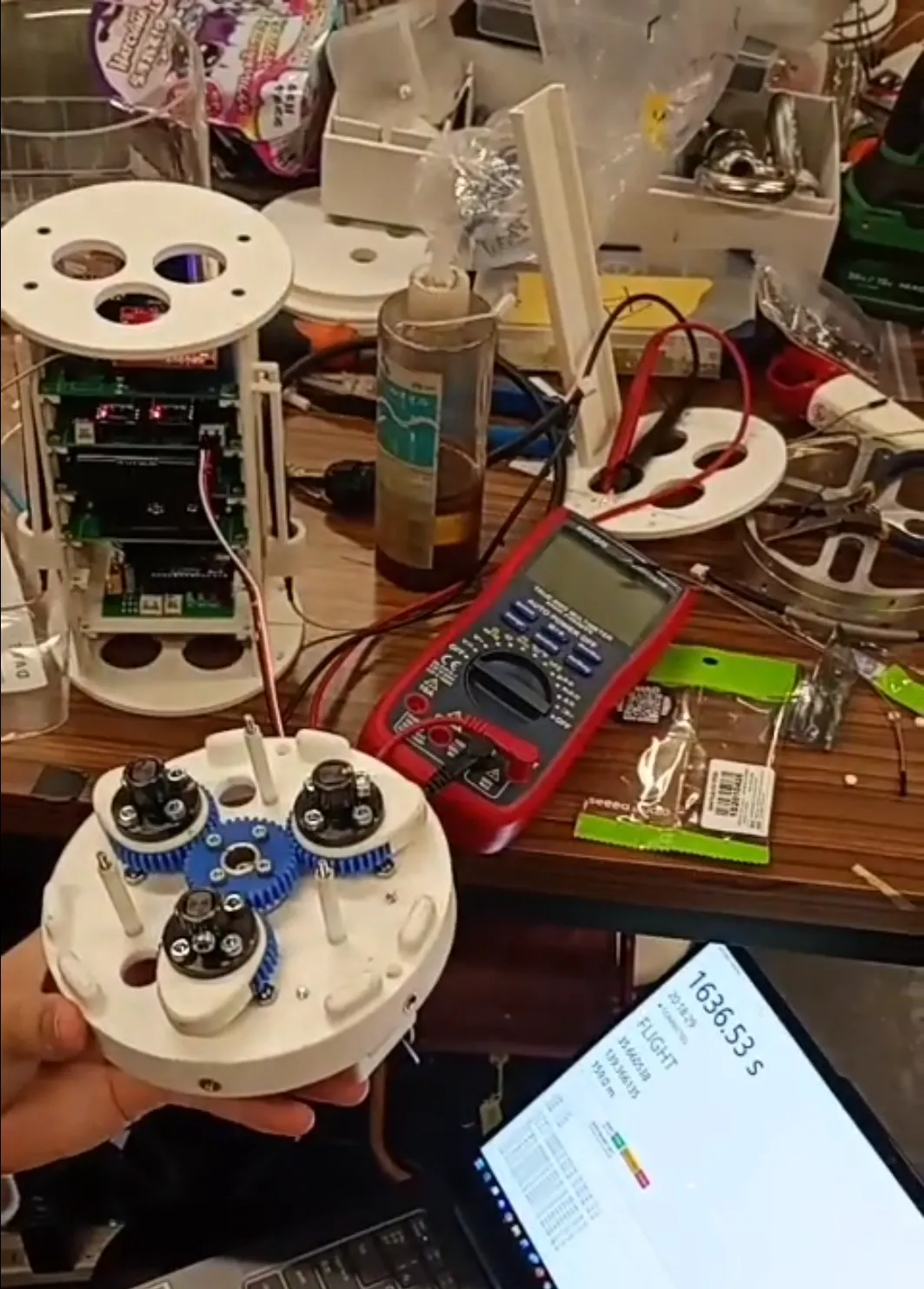
到着した基板に部品を組み込みはんだ付けを行います.
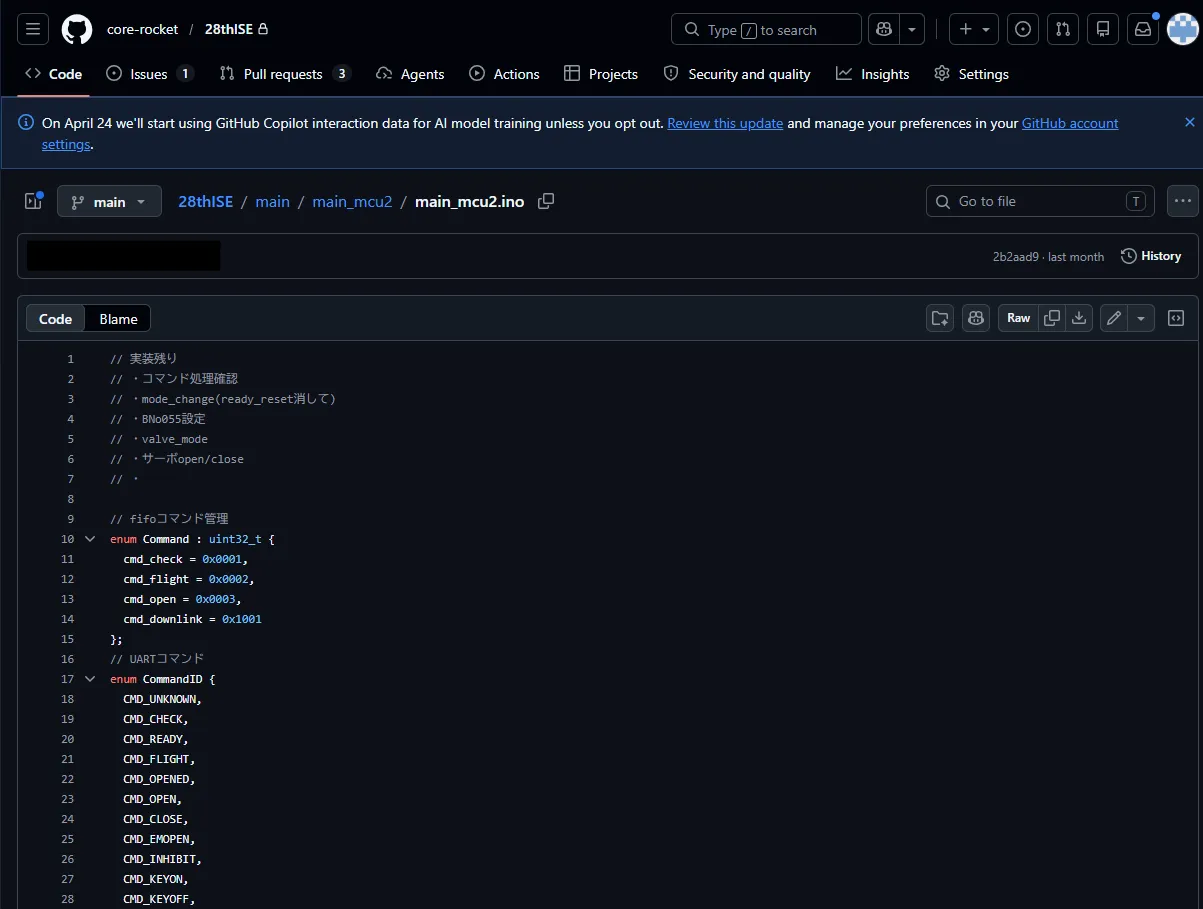
各マイコンに対してArduino言語を用いてプログラミングを行います. それぞれのセンサやモジュールが正常に作動し,速度やGPSを取得できるか試験を行います.
到着した基板に部品を組み込みはんだ付けを行います.
各マイコンに対してArduino言語を用いてプログラミングを行います. それぞれのセンサやモジュールが正常に作動し,速度やGPSを取得できるか試験を行います.